
Oliwia 257 wyśw.
23-01-2025 09:57
Zadanie domowe nr 5 zad.3.3
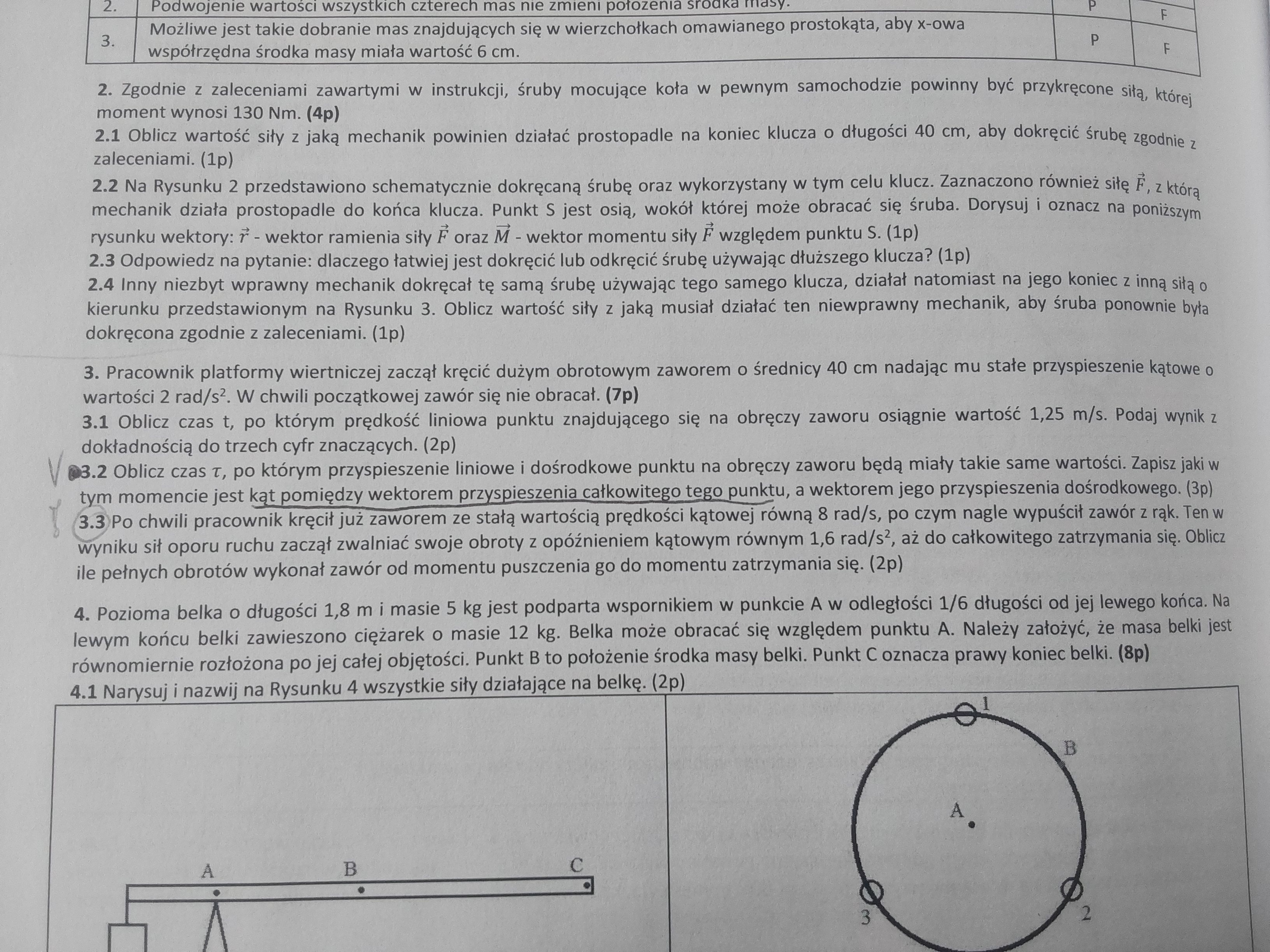
Dlaczego tak nie można tylko? Skąd w odpowiedziach wziął się wzór alfa=Et2/2?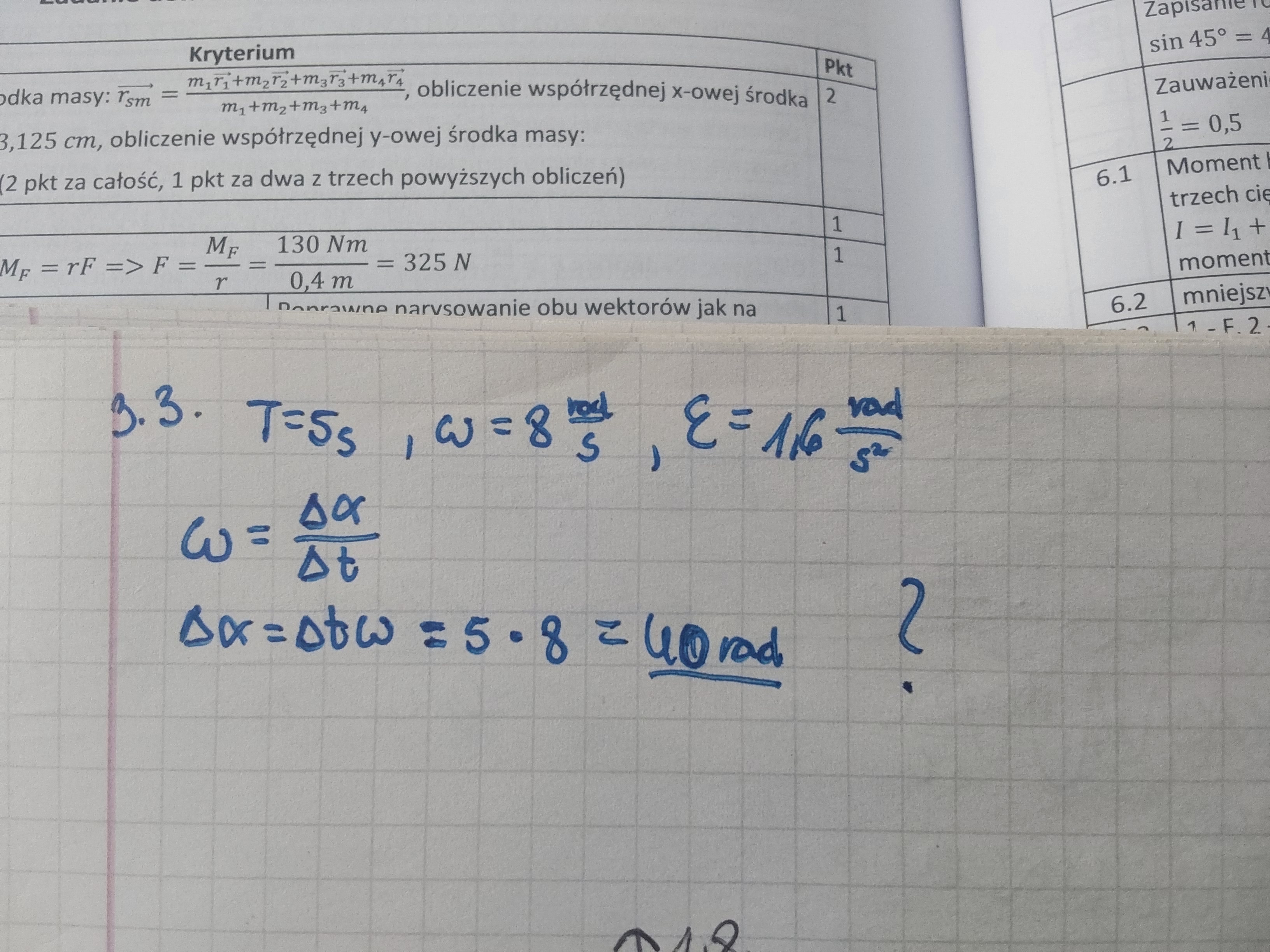
#Fizyka zadanie domowe 5 Dodaj post do ulubionych Poproś o pomoc
Kliknij tutaj, aby dodać nowy komentarz.
Zaloguj się lub zarejestruj, by móc dodawać komentarze.

s.gugula
24-01-2025 09:24
- 0
- Zaloguj się lub zarejestruj, by móc oceniać komentarze.
- Dodaj do ulubionych
Wzór z rozwiązań jest odpowiednikiem wzoru na drogę w ruchu jednostajnie opóźnionym, tylko że przeniesiony na ruch obrotowy. Odpowiednikiem przebytej drogi s jest zakreślony kąt alfa, odpowiednikiem prędkości liniowej v jest prędkość kątowa omega, a odpowiednikiem przyspieszenia liniowego a jest przysp. kątowe epsilon. A zatem w przypadku ruchu postępowego wzór byłby taki: s = at^2/2, toteż dla opóźnionego ruchu obrotowego wzór jest taki: alfa = epsilon*t^2/2.
Można natomiast w istocie skorzystać z definicji prędkości kątowej tak jak Ty to zrobiłaś, natomiast Ty przy okazji skorzystałaś jeszcze tutaj z definicji przysp. kątowego - tego nie zapisałaś, ale stąd wynika właśnie fakt, że ten ruch będzie trwał 5 s, bo przecież epsilon = delta(omega)/delta(t).