
igordr 299 wyśw.
05-03-2025 22:16
Nowa Era 2019 matura 3.
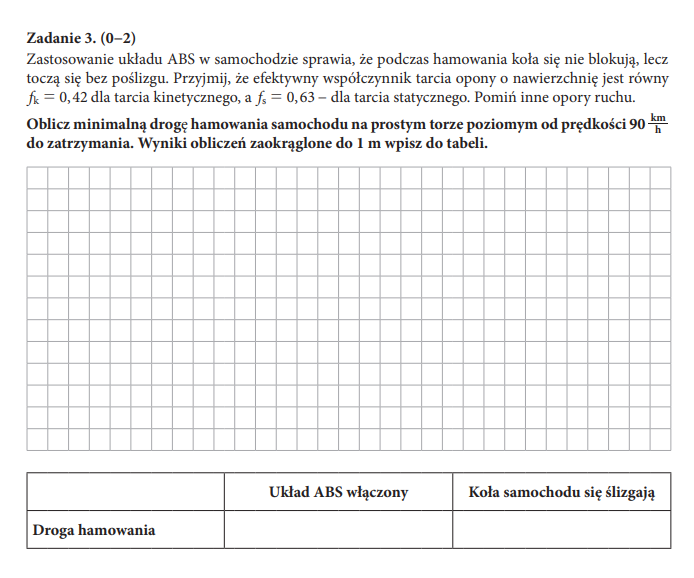
jakie dwa rownania ruchu postępowego i ruchu obrotowego będą zgodne z tym zadaniem i jak bedzie wygladac siła tarcia i dlaczego?
Fizyka Dodaj post do ulubionych Poproś o pomoc
Kliknij tutaj, aby dodać nowy komentarz.
Zaloguj się lub zarejestruj, by móc dodawać komentarze.

s.gugula
06-03-2025 12:42
- 0
- Zaloguj się lub zarejestruj, by móc oceniać komentarze.
- Dodaj do ulubionych
Nie musimy tutaj nawet zapisywać żadnych równań dla ruchu obrotowego, bo zauważamy, że siłą wypadkową, która działa na hamujący samochód będzie po prostu ta siła tarcia, wobec czego wystarczy wyznaczyć tę siłę i będziemy mogli zapisać już II zasadę dynamiki w ruchu postępowym, a stąd równanie kinematyczne na przebytą drogę. Siła tarcie to zgodnie z definicją T=f*mg, jest to jednocześnie siła wypadkowa, więc ma = f*mg, więc a = f*g. Mamy zatem opóźnienie samochodu. I teraz w zależności od tego czy koła się blokują czy nie, to w miejsce f dajemy wsp. tarcia statycznego (tak jest gdy koła się nie blokują - mamy toczenie bez poślizgu) lub wsp. tarcia kinetycznego (tak jest gdy koła się blokują - mamy poślizg kół po nawierzchni).
I potem wykorzystując fakt, że s = v0*t - at^2/2 oraz że vk = v0 - at, a ponieważ vk = 0, to v0 = at, możemy wyznaczyć wzór na drogę hamowania w zależności od początkowej prędkości - wyjdzie nam s = v0^2/2a. Wstawiamy tu odpowiednie przyspieszenia i mamy dwie drogi hamowania.